Music · Web App음악 · 웹 앱
Fretwright
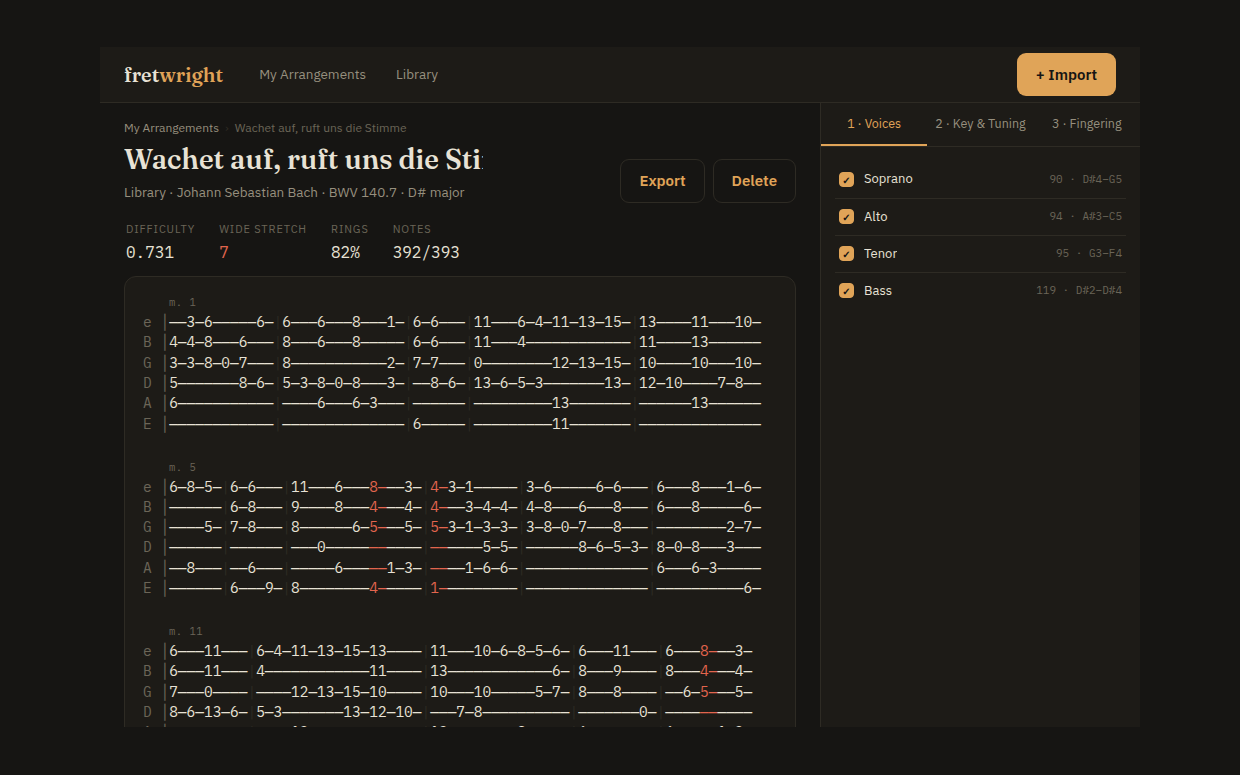
Turns any MIDI or MusicXML into playable classical-guitar tablature, right in the browser. It auto-transposes to the easiest key and has a difficulty knob that thins dense, multi-voice writing down to what your hands can actually manage.
MIDI나 MusicXML 파일을 브라우저에서 바로 연주할 수 있는 클래식 기타 타브로 변환합니다. 가장 치기 쉬운 조성으로 자동 이조하고, 난이도 노브로 빽빽한 다성부 악보를 손이 감당할 수 있는 수준까지 줄여줍니다.
Free, no signup, nothing stored on a server — export to MusicXML to finish in MuseScore. Comes seeded with a few hundred Bach chorales.
무료, 회원가입 없음, 서버에 아무것도 저장하지 않습니다. MusicXML로 내보내 MuseScore에서 마무리할 수 있고, 수백 곡의 바흐 코랄이 기본 제공됩니다.
MIDI / MusicXML
Auto-transpose자동 이조
Difficulty knob난이도 조절
MusicXML exportMusicXML 내보내기
Free무료